The HAPTEX Project
Tactile stimulator on the fingertip: 24 contactors per digit (6 × 4 array, with 2 mm spacing between contactor centres); piezoelectric drive mechanisms give individually specified movement of each contactor (working bandwidth 20-400 Hz)
HAPTEX was an EU-funded project (EU-FP6-IST: IST-6549) on multimodal perception of textiles in virtual environments.
Its main goal was to develop a complete virtual reality system for visuo-haptic interaction with virtual textiles. The project ended in November 2007 and has produced a workable system for the presentation of virtual textiles, with successful integration of a wide range of hardware and software components.
The Exeter contribution to the project has focussed on the tactile component. This has involved the development of novel stimulator hardware (see right hand panel), together with drive electronics and tactile-rendering software for generating “on the fly” the appropriate spatiotemporal patterns of tactile stimulation on the fingertips. Building on the success of the HAPTEX project, the members of the HAPTEX consortium have plans for further projects to continue the development of virtual systems for textiles and other deformable objects.
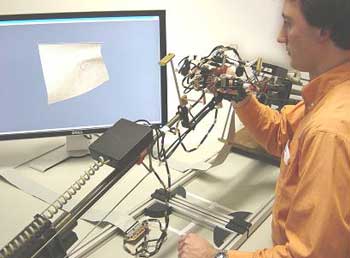
The HAPTEX system: an integration of the visual display, the haptic/tactile system and the modelling/rendering software |
Evaluation of the HAPTEX System
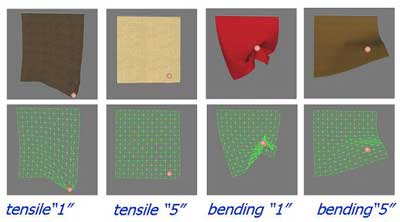 Evaluation of the HAPTEX System involved the manipulation and rating of virtual textiles, with comparison to ratings of the corresponding real textiles. Various textile properties were rated: surface roughness, surface friction, tensile stiffness and bending stiffness,. In all but the latter case (i.e., in three cases from four) there was a good correspondence between the ratings of the virtual textiles and the real textiles, providing evidence that the system is delivering appropriate cues. Evaluation of the HAPTEX System involved the manipulation and rating of virtual textiles, with comparison to ratings of the corresponding real textiles. Various textile properties were rated: surface roughness, surface friction, tensile stiffness and bending stiffness,. In all but the latter case (i.e., in three cases from four) there was a good correspondence between the ratings of the virtual textiles and the real textiles, providing evidence that the system is delivering appropriate cues.
The figure shows screen shots for some of the manipulations: stretching to evaluate tensile stiffness and draping to evaluate bending stiffness.
|
Haptex video:
Follow this link to watch a video outlining the HAPTEX project (approx 41MB)
Project website:
The project website can be found at http://haptex.miralab.unige.ch/
The project deliverables are available for download from the above site.
|
Related publications:
D Allerkamp, G Bottcher, AC Brady, J Qu, IR Summers and F-E Wolter; ‘Tactile rendering: a vibrotactile approach’, Proceedings of Haptex’05, Hannover 2005: 30-42.
AC Brady, IR Summers, J Qu and C Magnusson; ‘Discrimination of tactile rendering on virtual surfaces’, Proceedings of Enactive’06, Montpelier 2006: 107-108.
D Allerkamp, G Böttcher, F-E Wolter, AC Brady, J Qu and IR Summers; ‘A vibrotactile approach to tactile rendering’, The Visual Computer 23 2007: 97-108.
AC Brady, J Qu, S Carr and IR Summers; ‘Tactile rendering of virtual objects’, Proceedings of Enactive’07, Grenoble, 2007: 45-48.
N Magnenat-Thalmann, P Volino, U Bonanni, IR Summers, M Bergamasco, F Salsedo and F-E Wolter; ‘From Physics-based Simulation to the Touching of Textiles: The HAPTEX Project’, The International Journal of Virtual Reality 6 2007: 35-44.
N Magnenat-Thalmann, P Volino, U Bonanni, IR Summers, AC Brady, J Qu, D Allerkamp, M Fontana, F Tarri, F Salsedo, M. Bergamasco, ‘Haptic Simulation, Perception and Manipulation of Deformable Objects’, Proceedings of Eurographics’07, Prague, 2 2007: 1-22.
M Fontana, S Marcheschi, F Tarri, F Salsedo, M Bergamasco, D Allerkamp, G Böttcher, F-E Wolter, AC Brady, J Qu, IR Summers, ‘Integrating Force and Tactile Rendering Into a Single VR System’, Proceedings of Cyberworlds 2007, Hannover, 2007: 277-284.
